Yaw Angle Selection
Assume that the speed of the aircraft is determined. Then, we are left with the problem of selecting the yaw angles along the path. If the vehicle is equipped with a forward facing camera with a limited field of view, then the selection of yaw angle is important. We developed a soft indicator function that measures the co-visibility (a measure of the duration of observing a particular landmark) that can be added to the trajectory generation problem. This then solves a local problem to generate a sequence of yaws along the trajectory that maximizes the total duration a landmark is visible along the path. Our results show that this improves the robustness of trajectory tracking for closed loop control as the desired speed is increased.
The two videos below show the yaw angle looking forward and yaw angle optimized, respectively. In the first video the vehicle flies with the vehicle looking forward along the trajectory. In the second video, the yaw angle is optimized using our approach. It is noticeable that, in the second approach the vehicle "looks" at the more feature-rich center location in the room in a way that features can be tracked (are in the camera view) for longer.
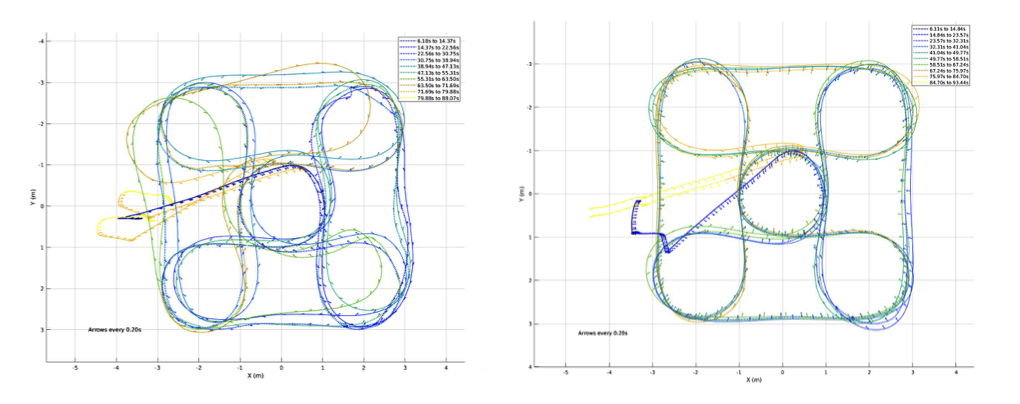
The figures below show the results of visual-inertial state estimation in both cases. The figures show the estimated trajectory using visual-inertial state estimation methods. In the first case the state estimate diverges rapidly, while the drift is much smaller in the second case.